Collision.cpp File Reference
The collision detection API. More...
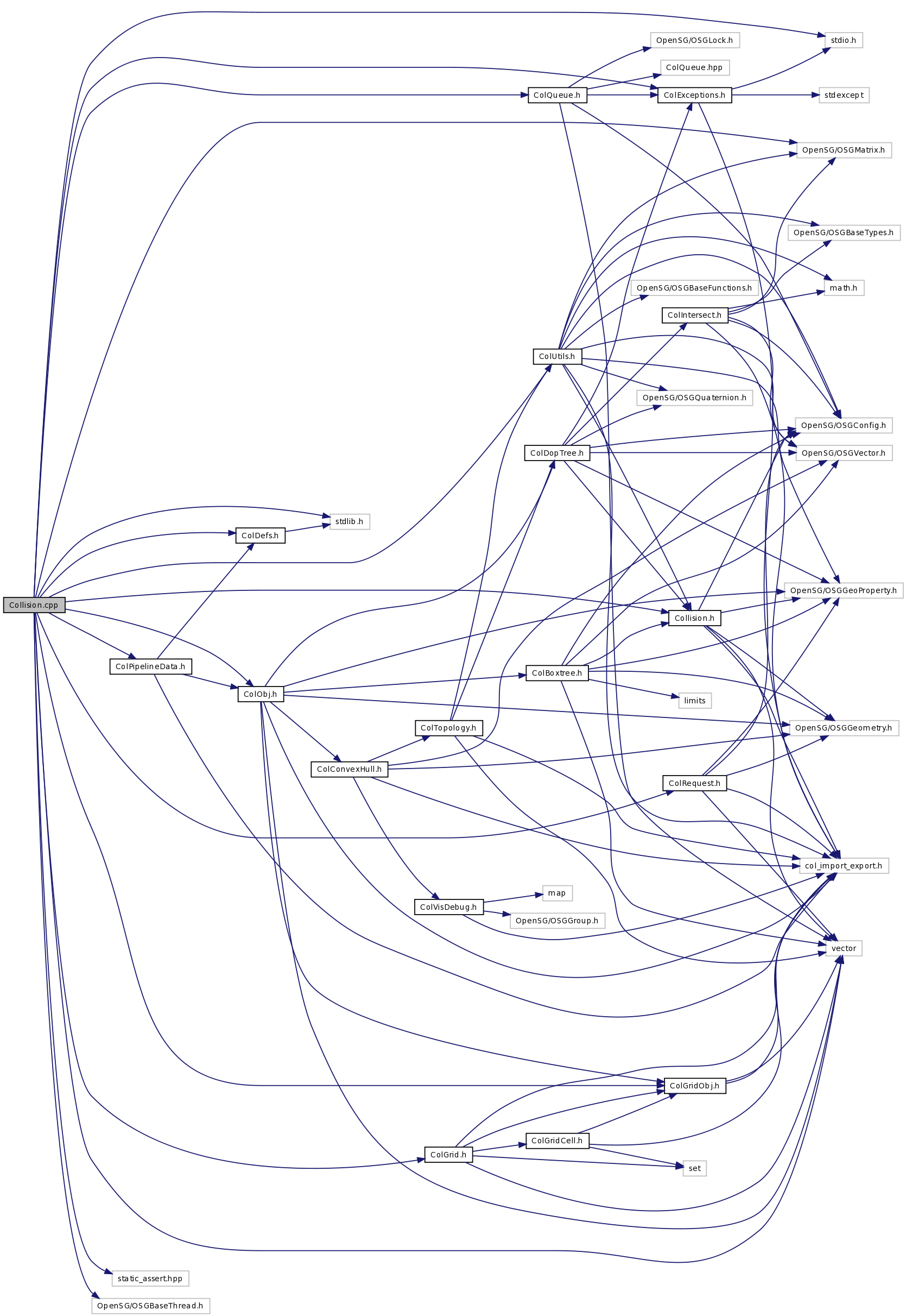
Include dependency graph for Collision.cpp:
|
Namespaces |
| namespace | col |
Classes |
| class | col::VtableTest_Pnt3f |
| class | col::VtableTest_Vec3f |
| class | col::VtableTest1 |
| class | col::VtableTest2 |
Functions |
|
| col::BOOST_STATIC_ASSERT (sizeof(VtableTest1)==sizeof(VtableTest2)) |
|
| col::BOOST_STATIC_ASSERT (sizeof(osg::Pnt3f)!=sizeof(VtableTest_Pnt3f)) |
|
| col::BOOST_STATIC_ASSERT (sizeof(osg::Vec3f)!=sizeof(VtableTest_Vec3f)) |
Detailed Description
The collision detection API.
Requests to the collision detection module are made by creating a Request object containing the appropriate data, and passing that to col::request().
The C file contains the collison detection pipeline.
- Precondition:
- Polygons must be convex! (see intersectPolygons) osg::Vec3f must not have non-trivial constructors and desctructors, and it must not have a vtable, i.e., virtual functions! (see intersectPolygons)
- Author:
- Gabriel Zachmann
- Todo:
- Neg. callbacks implementieren.
- osg::Log benutzen statt stderr? (ist nicht thread-safe..)
- If there is something in the Requests queue, do a sync, before processing the queue.
- Instanzvariablen tatsaechlich (gemaess Guidelines) mit _ benennen.
- Threadfaehigkeit neu eingebaut, ausgiebig test (tobias)
Generated on Tue Oct 16 18:12:36 2007 for CollDet by
 1.5.2
1.5.2